
2021年4月1日,被誉为“中国天眼”的500米口径球面射电望远镜(FAST)将正式对全球科学界开放。在2020年12月初,美国阿雷西博射电望远镜坍塌后,位于中国贵州省平塘县的FAST成为了全球唯一的“大眼睛”。截至目前,FAST已经累计发现了240余颗脉冲星,不断为人类探索外太空提供线索。
将位于西安电子科技大学图书馆前的50米射电望远镜“馈源支撑与指向跟踪系统模型”等比例放大10倍,就与FAST所应用的馈源驱动系统基本一致。FAST是由6座塔、6根索驱动的馈源运动系统,汇聚着中国天文学家探索宇宙的勇气,集聚着中国工程师挑战极限的信念,更凝聚着中国众多领域科学家的聪明才智。在这其中就包括中国工程院院士、机电工程学院教授段宝岩带领团队贡献出的“西电智慧”。
一、FAST三大自主创新之一,
将馈源系统由万吨级降至30吨
1993年,第23届国际无线电科学联盟大会在日本京都召开,包括中国在内的10国天文学家联合发起了建造接收面积达一平方公里的“新一代大射电望远镜计划”倡议。
建造单口径射电望远镜有两种方案:一种是全可动的抛物面天线,比如美国的绿岸射电望远镜,口径为100×110米,重达7700吨,几乎接近工程的极限;另一种是主反射面不动而馈源动的球反射面射电望远镜,比如美国利用喀斯特地形建造的阿雷西博射电望远镜,口径305米,支撑馈源的悬空背架重达1000吨,也几乎是此类射电望远镜的最大规格。相比之下,后者更为可行,但若要继续增大口径,不仅已有的施工手段不可行,工程的造价成本更是可望而不及。
孜孜以求,锲而不舍。为了达到一平方公里的指标,科学家们一直在探寻可能方案。终于,在1995年,中国天文学家在大窝凼找到了最佳地点,这里不但有世界上最佳的喀斯特地貌,天然形成的超大型碗状500米口径天坑,还拥有着天文观测所需较为洁净的电磁环境。因此,在中国建造新一代射电望远镜成为可能的首选方案。
同年,第三届国际大射电望远镜工作组会议在贵州召开,此次会议就大射电望远镜建造的创新设计方案展开讨论,段宝岩在会上所作的关于大射电望远镜馈源支撑的光机电一体化创新设计的报告,受到了国内外专家的高度关注,这也是西安电子科技大学与FAST结缘的开始。
如果新一代大射电望远镜阵照搬阿雷西博的设计方案,将会出现三个难题:一是工程造价太高,远远超出国家社会对新一代大射电望远镜的接受程度;二是纯机械跟踪控制系统的精度低;三是工程难度大,当口径达到500米时,悬空背架的重量理论上将近万吨,工程实施难度极大。段宝岩团队所设计的新方案舍弃了悬空背架,不仅可将馈源支撑结构系统的自重降至约30吨,工程实施和造价变得可行,还克服了阿雷西博方案中结构稳定性方面的不足。
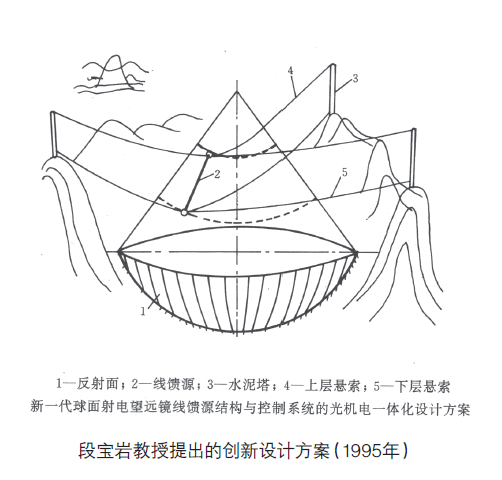
这一方案的核心就是将原阿雷西博方案中,用于支撑线馈源重达1000吨的钢结构转变为用计算机伺服系统控制的从6个塔顶伸出的6根大跨度的柔索。同时,布置3台激光测距仪实时获取馈源的实际位姿,通过6索长度的自动调整,将馈源调回到电性能所允许的误差范围之内。创新方案中以光机电一体化技术代替了传统的纯机械技术,以软件代替硬件,结构形式大大简化,极大程度地降低了工程造价,使大射电望远镜工程的实现成为可能。
会后,段宝岩担任了中国大射电望远镜推进委员会工程预研究组组长,带领西电团队致力于关键技术的突破,馈源支撑与指向跟踪系统就采用了六索驱动的设计方案。这一光机电一体化馈源索支撑方案,与利用贵州喀斯特地形建造射电望远镜、创新性的主动球反射面一同被誉为FAST工程的三大创新。
二、粗精两级调整控制,
确保馈源定位精度达到4毫米
FAST选择在贵州一处500米级的球形洼地中建造,洼地内铺设主动反射面。被馈源照明部分的球形反射面,可实时地调整为一个抛物面,从而可用传统的抛物面望远镜的馈源照明技术来实现宽带观测。如果说球形洼地是这只“观天巨眼”的“眼窝”,那么由悬索支撑的馈源舱与馈源就是“观天巨眼”的“眼珠”。
FAST实际使用的馈源舱装置与西电的50米模型略有不同,增加了A、B轴进行调控,利用柔索与Stewart平台对馈源进行粗精两次调节。创新设计方案中,将动态悬索应用于望远镜馈源的结构支撑,解决的主要是工程实施和造价问题,但如何突破关键技术,进而实现这个射电望远镜要求的总体性能,就成为了一个很大的挑战。FAST反射面曲率半径300米,开口角120度,口径520米,天空覆盖最大观测天顶角60度,馈源工作时理论速度为每秒1厘米,工作频率最高为8.8G赫兹。简单来说,就是要确保6根悬索控制的馈源舱中的馈源,实现不超过4毫米的动态定位精度。
在新方案中,就克服了阿雷西博方案的弱点,但对工程控制却提出了更高的要求。由悬索和馈源舱组成的舱索结构,具有非线性、大滞后、大惯性和弱刚度等特性,并且在工作中难免受到风荷等外界干扰,仅靠悬索的控制很难使馈源舱达到指标要求的毫米级动态定位精度。
鉴于此,段宝岩团队提出了粗、精两级调节来实现馈源高精度动态定位定姿的方案。首先通过6根悬索对馈源舱实现粗调节,再通过安装在馈源舱内的Stewart平台实现精调节。Stewart平台上又分布了多个馈源,所以在提高定位精度的同时,还可实现多波段观测。
基本原理很简单,但如何突破这一技术难题却没有现成的办法。这类射电望远镜悬索式馈源舱支撑系统,理论上属于并联机构学范畴,当时国际上关于这一领域的研究处于探索阶段,尚未形成系统的理论与方法。团队在研究中首次提出了并联宏——微机器人概念,从理论上建立了逆运动学模型,并通过实验对方案及策略进行了初步验证。6根悬索驱动的馈源舱实际上是一柔性并联机构,而精调Stewart平台是一刚性并联机构。这一大一小、一柔一刚两个并联系统,构成了一个并联宏——微机器人系统,共同完成对馈源定位的任务。宏机器人系统为6根悬索驱动的馈源舱,完成馈源的大范围跟踪,保证馈源舱的误差在50厘米内;微机器人为6自由度Stewart平台,实现馈源的精确定位,也就是4毫米。
对FAST馈源舱的粗、精两级调节是一项关键技术,研究中需要解决粗精两级调整的动力学耦合与复合控制,高精度动态激光检测,大跨度、柔性、延迟索系结构系统的建模与求解,风致颤振、齿隙、摩擦等非线性因素对系统性能的影响,舱索结构对增益、副瓣电平等电性能的影响等一系列问题,最终段宝岩团队还是成功完成了设计。
三、5米及50米缩尺模型研究,
验证了500米创新设计方案的可行性
FAST是国家科教领导小组审议批准的国家九大科技基础设施之一,从面积上看这是一个约30个足球场大的高灵敏度的巨型射电望远镜。然而,建造这样一个大科学装备,仅仅进行计算仿真是远远不够的,所有理论、方法都需要通过模型进行验证,并对实际装置性能进行预测,彻底搞清关键问题,从而为工程建设奠定基础。
FAST的设计是一个多学科交叉项目,涉及到机械、电子、力学、控制及动态监测等多个领域。为了在进行500米实际工程之前,对工程实施中将用到的相关技术进行验证,段宝岩教授带领团队先后于2000年、2002年和2008年,搭建出一个5米和两个50米的缩尺验证模型。
第一个模型是在国家自然科学基金支持下进行的,团队在实验室搭建了一个1:100比例的5米室内模型,其目的主要是验证基本理论和控制系统相关技术。这一模型的6根悬索立柱均匀分布在直径5米的圆上。此外,为简单起见,用了一个直径40厘米重6千克的球冠模拟馈源舱。结果显示,6根并联悬索进行物体的空间动态定位这一设计思路是可行的,悬索可以协调工作,系统控制方案合理,馈源舱动态跟踪误差在1厘米量左右。
第二个模型在中国科学院知识创新工程重大项目支持下进行,位于西安市南郊的沙井村,是一个1:10比例的50米室外模型。在这一模型中,6个支撑塔的高度为15米,均匀分布在直径50米的圆上,馈源舱为直径2.5米的半球。一系列实验结果显示,系统能较好地跟踪所期望的理论轨迹,馈源舱中心的跟踪误差在40毫米以内,动平台中心位置的跟踪误差始终在10毫米以内,精调Stewart平台的误差缩小功能明显。然而,这距离馈源指向跟踪系统4毫米的跟踪精度要求仍有一段不小距离。
在第二个模型中,使用的Stewart平台是北京理工大学已有的成品,平台底座尺度比理论值大,客观原因导致模型未能完全按照1:10缩比尺寸建造。为此,团队又按照1:10的比例,在西安电子科技大学南校区建造了第三个50米的等比实验模型。在第三个模型中,塔、索、馈源舱、精调Stewart平台全部自主设计,实验结果表明,通过馈源支撑系统的粗、精二级调整,精调平台能够实现3毫米的定位精度和0.06角度的指向精度。
四、FAST是一个中国天文学家、
科学家以及工程承建单位集体智慧的产物。
西安电子科技大学这些不同比例的模型试验,验证了馈源舱悬索控制策略、馈源运动粗精控制算法、轨迹规划策略和轨迹跟踪控制等,说明创新设计方案在工程上是有效可行的,为FAST工程建设扫除了关键技术障碍,共同为500米口径大射电望远镜的实际建造积累了有益的工程经验。
2001年,国家天文台在中科院知识创新工程重大项目“大射电望远镜FAST预研究”总结报告中指出:西电多年来发展起来的光机电一体化馈源支撑方案为解决大型球反射面望远镜的指向跟踪问题提供了可行思路;2006年国家天文台FAST项目国际评审咨询会议报告介绍了西电提出的用6座索塔和6根柔索控制馈源粗调位置及姿态的设计方案,为国际评审提供了有力的技术支撑;2017年,西安电子科技大学项目团队获得《500米口径射电望远镜柔性并联索驱动系统技术及装备》中国好设计金奖,实至名归。
