为了更好地对跳跃运动进行研究,本人选择了比人跳跃能力更强的青蛙作为研究对象。在研究过程中通过查阅资料得知,青蛙的腿部肌肉组织有12块。经过筛选得到三块主要的肌肉组织,这三块肌肉主要控制脚的运动、小腿的运动、大腿的运动。本人通过对运动过程的观察,得知肌肉有很大的爆发力,从而采用三个气缸模拟青蛙的肌肉组织,利用压缩空气作为动力的主要来源,驱动整个青蛙实现跳越运动。现已可以越过高13cm的障碍,跳跃距离长达50cm。
经过实际测量和查阅资料,得知青蛙小腿大腿和身体的比例为是1:1:2,青蛙在跳跃运动中主要使用的是股三头肌、大腿肌、腓肠肌、股前直肌。
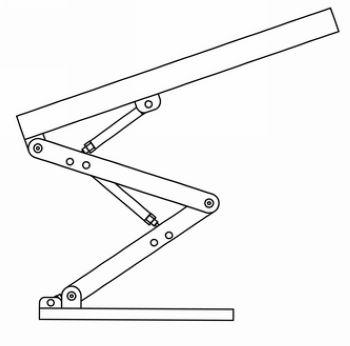
利用solidworks电脑仿真软件,分步模拟了蛙跳动作,其步骤为:两脚分开成半蹲,上体稍前倾,两臂在体后成预备姿势,两腿用力蹬伸,充分伸直髋、膝、踝三个关节,身体向前上方跳起,然后用全脚掌落地屈膝缓冲(如图1所示)。

图(1)
动力的选择主要有三个要求:(1)力量大;(2)质量轻;(3)速度快。在动力材料选择方面起初有三个设想:一是采用电机,二是液压,三是气动装置驱动。但是后来发现青蛙起跳的过程中腿部有着很大的爆发力而且速度很快,如果用电机有速度但是力量又达不到,所以舍去电机,开始在液压和气动装置中抉择。经过对这两种装置的对比发现,液压装置主要是用液体驱动的,但是仿生青蛙为了能成功跳跃要使整体的重量尽可能轻,所以最终选择了气动装置作为主要的动力来源。
机身的主要要求是重量轻,强度高。所以主要材料使用铝合金,在关节处采用定制的铜合页。
控制端选用的是Arduino控制器连接继电器和电磁阀,对起跳步骤进行控制。
气源采用的是容量为11L,最大压力为0.8Mpa的空气压缩机,经过调整机械调压阀,把气压控制在0.7Mpa。
利用solidworks设计软件初步画出机身轮廓,并确定小腿长30cm、大腿32.5cm、身体45cm、脚30cm,大小腿的比例基本上为1:1:2,大腿比小腿略长,主要目的是把站立时的重心后移,使落地时更加稳定。脚与小腿之间的夹角为30度,小腿和大腿之间为60度,大腿和身体之间的夹角为50度,从而形成起跳时的半蹲姿势。同时确定6个气缸安装的位置,使其完全舒展开时呈现出脚和小腿90度夹角,小腿和大腿之间呈现150度夹角,大腿和身体之间呈现150度夹角。这样在跳跃过程中能够使机身完全伸展(如图2、3所示)。
图(2) 图(3)
由于本人对金属加工十分感兴趣,所以自家配置了车床和铣床以及介铝锯。具体制作过程首先对铝合金型材量取所需要的长度,然后用划针画线,再使用介铝锯纵向切割,最后切得30cm长的三根、45cm长一根、32.5cm长一根的材料备用。第二步,将切割完的型材用螺丝固定在铣床上,使用锯片对型材横向剖开。把一根30cm和一根45cm的剖成角铝,把一根30cm的取40mm边的中心线剖开,把剩下没有剖的两根分别沿70mm中心线剖开。第三步,用介铝锯切割倒角,把身体所需的4根角铝切割45度倒角,把腿部的两根30cm和两根32.5cm的型材的一段都切割最大角度的倒角。第四步,按照气缸安装孔位打孔,包括合页的安装孔。第五步,安装,并对有误差的安装孔进行修改。
控制端采用的是Arduino控制器连接继电器控制电磁阀的方法,电源使用的12V电瓶(如图4所示)。

图(4)
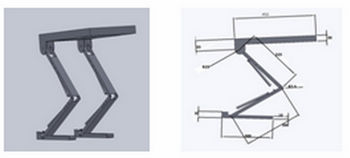
经过测试修改最终制作出三代作品。第一代特性:重量轻,无法完成正常弹跳,机身硬度低,关节强度差,控制端气量小;第二代特性:爆发力大,气量足,能够跳跃15cm高、50cm远,缺点是由于机身和控制端分离,受气管牵连,导致跳跃成功率较低;第三代产品是对第二代产品进行了改进,把控制端、储气罐、机身合为一体,并选用精度更高的合页,其特性为:跳跃成功率高,机身整体强度高。三代产品具体参数如下表所示。
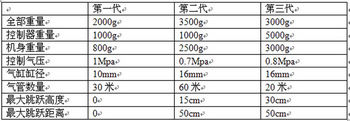
图5为蛙式跳跃仿生机器人的结构图与示意图。

图(5)
责编/毕海蛟